

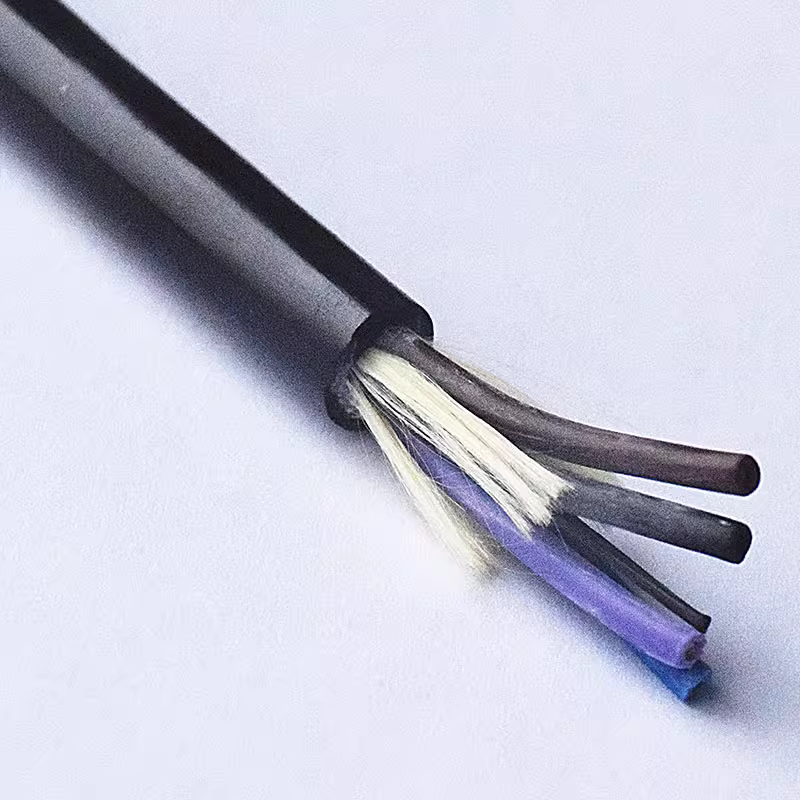
Robot Cable for Industrial Robotics with High Flex Life for Continuous Motion
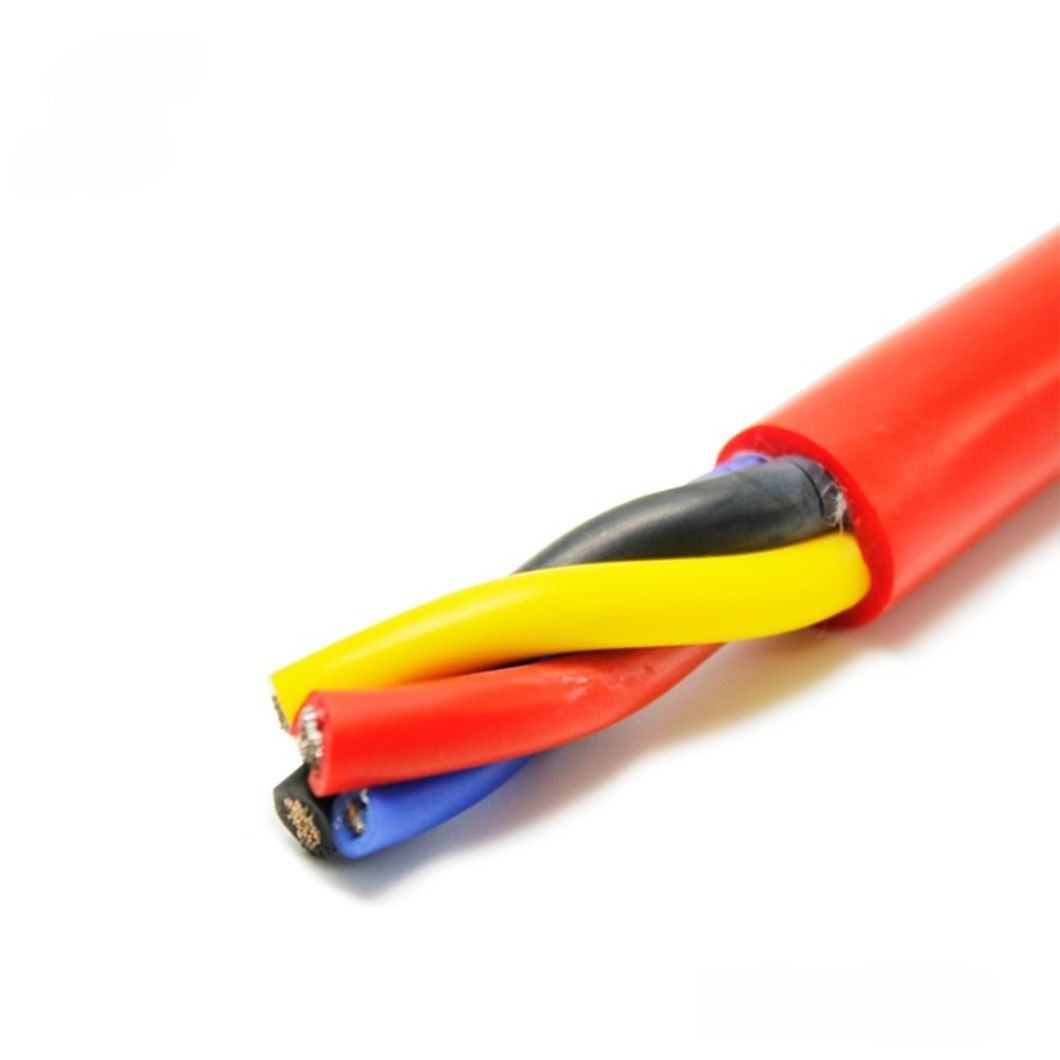
Designed for multi-axis robotic movement, this cable combines high flex life with torsion resistance, ensuring stable performance under continuous bending and twisting conditions. The PUR outer jacket provides strong abrasion resistance and durability in demanding automation environments.
Key Benefits:
✅ High flex life for continuous robotic motion
✅ Torsion-resistant structure for multi-axis movement
✅ Stable signal transmission under dynamic conditions
✅ PUR jacket for abrasion and oil resistance
Robot Cable for Industrial Robotics with High Flex Life for Continuous Motion
Designed for Combined Bending and Torsion in Robot Motion
Industrial robot cables operate under conditions that standard flexible cables are not designed for:
-
Continuous bend reversal
-
Simultaneous torsion (twist)
-
High acceleration at joint transitions
In these conditions, failure is not random — it follows predictable mechanical patterns.
This cable is engineered to control those failure mechanisms rather than react to them.
Typical Failure Modes in Robotic Applications
Conductor Fatigue at Reversal Points
Copper strands harden under repeated bending and lose elasticity before fracture.
Design response:
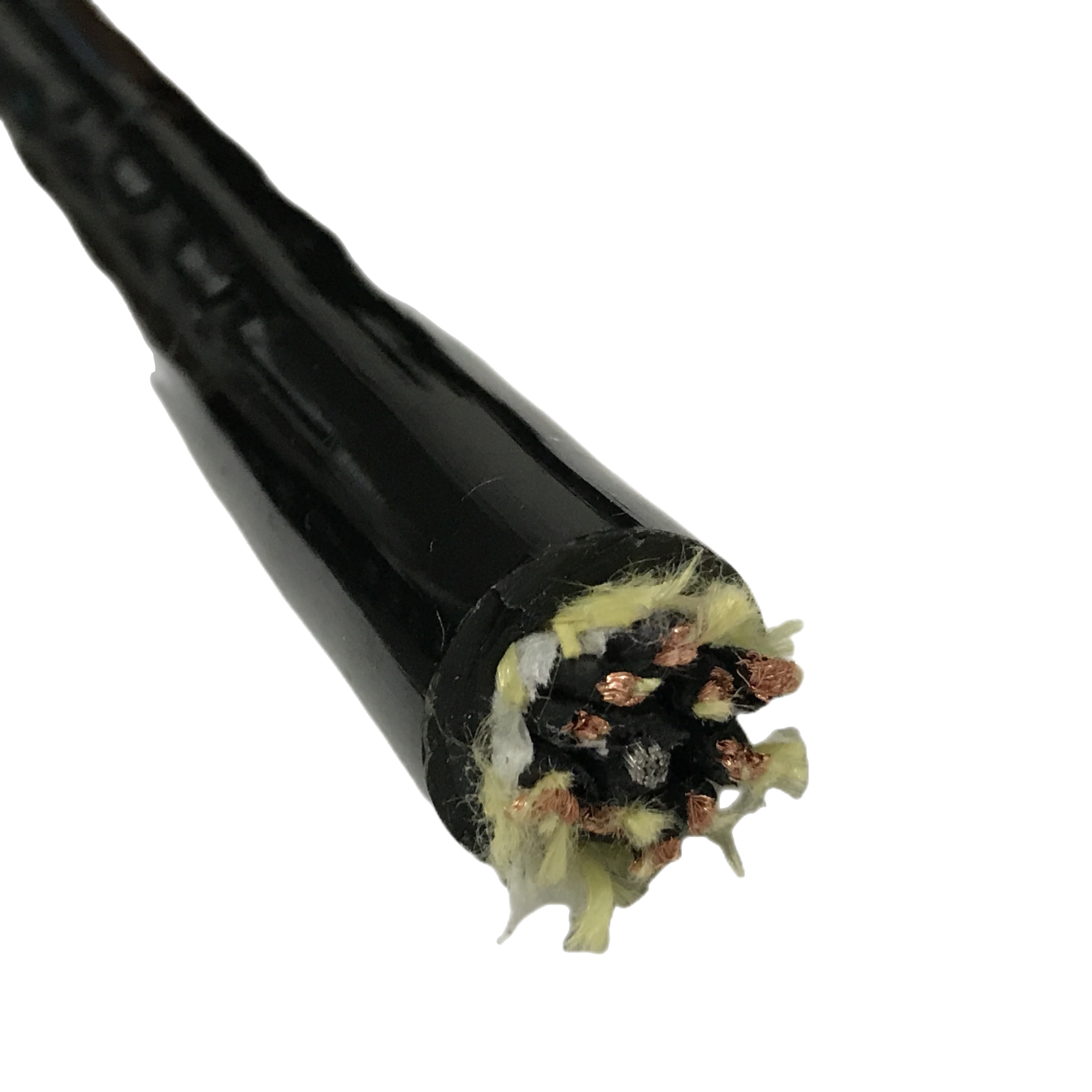
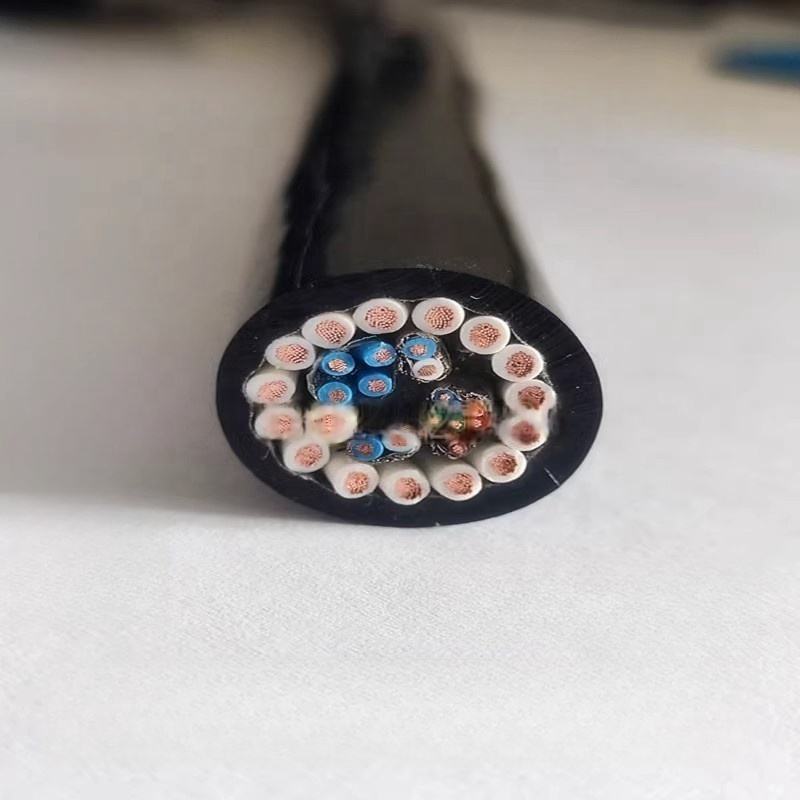
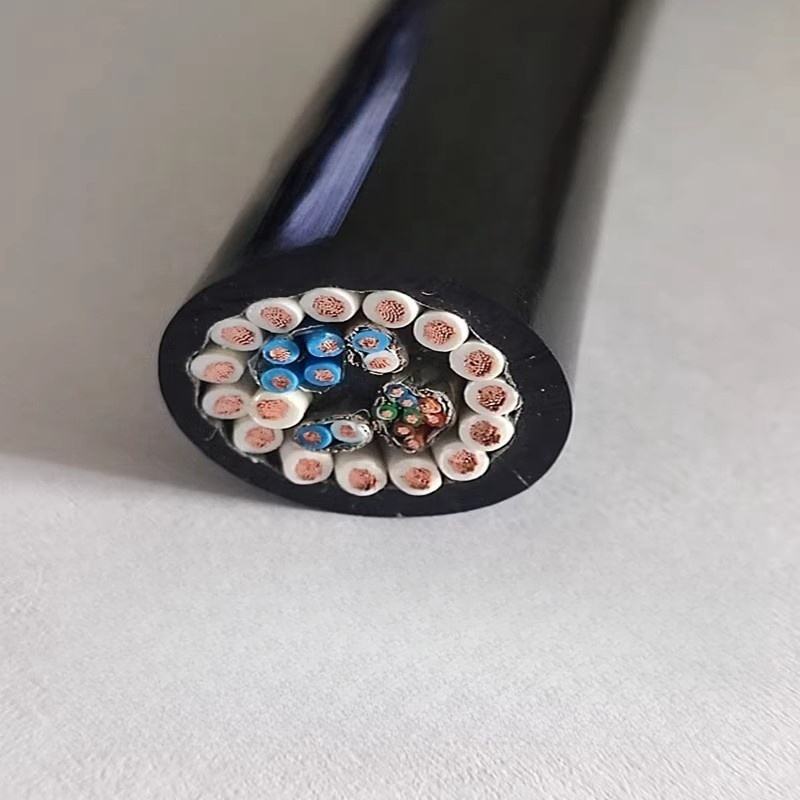
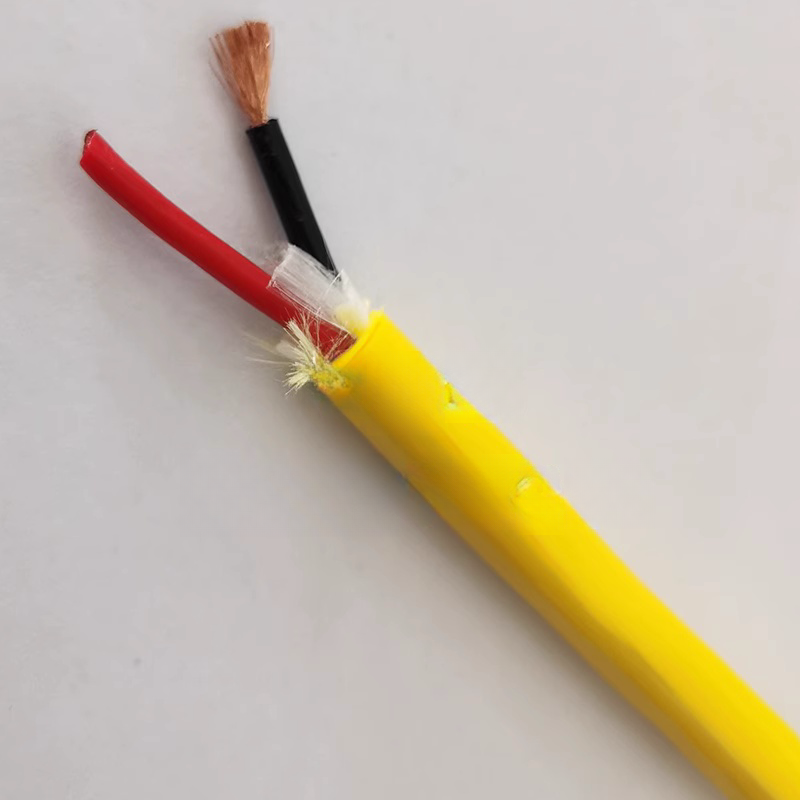
Ultra-fine stranding reduces per-wire stress and delays fatigue accumulation.
Internal Core Displacement Under Torsion
Unbalanced structures shift internally during twist, creating localized stress zones.
Design response:
Layered stranding with controlled lay direction minimizes internal movement.
Sheath Wear at Contact Surfaces
Cable contact with dress packs or guides creates continuous abrasion.
Design response:
High-density PUR outer layer reduces material loss and maintains geometry.
Signal Instability During Motion
Movement introduces impedance fluctuation and electromagnetic interference.
Design response:
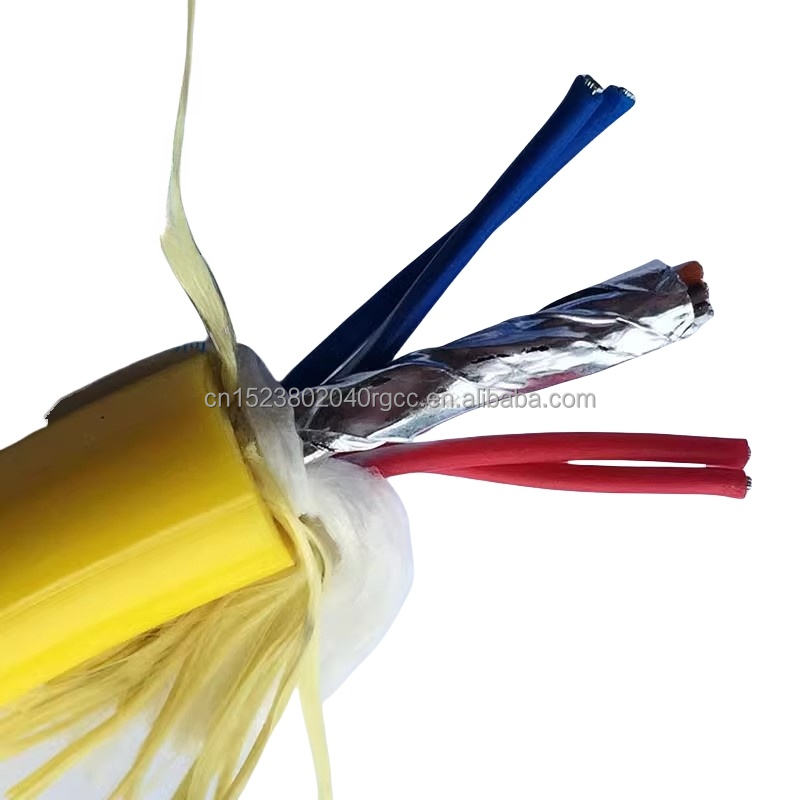
Optional braided shielding and stable insulation geometry maintain signal consistency.
Mechanical & Electrical Characteristics
| Parameter | Value |
|---|---|
| Flex Life | ≥ 10 million cycles |
| Torsion Capability | ±180°/m |
| Dynamic Bend Radius | 6 × OD |
| Conductor Type | Class 6 OFC (ultra-fine) |
| Shield Coverage | ≥ 85% (braided, optional) |
| Jacket Material | Polyether PUR |
| Temperature Range | −40°C to +90°C |
These values reflect performance under continuous motion, not static installation.
Robot Cable vs Drag Chain Cable (Engineering Comparison)
| Feature | Robot Cable | Drag Chain Cable |
|---|---|---|
| Motion Type | Bend + torsion | Linear bending only |
| Torsion Resistance | High (±180°/m) | Limited / not rated |
| Internal Structure | Torque-balanced | Flex-optimized |
| Application | Robot arms, joints | Linear axes |
| Failure Mode | Torsion fatigue | Bend fatigue |
Conclusion:
Using a drag chain cable in a robot joint typically results in early torsional failure.
Application Mapping by Robot Type
| Robot Type | Cable Requirement | Recommended Design |
|---|---|---|
| 6-axis robot | High torsion + flex | Torsion-balanced cable |
| SCARA robot | High-speed repetition | Low-stiffness flex cable |
| Welding robot | EMI + heat exposure | Shielded PUR cable |
| Handling robot | Space constraint | Hybrid cable |
Available Configurations (Procurement-Focused)
-
Core count: 2–36 cores
-
Cross-section: 0.14 – 2.5 mm²
-
Shielding: unshielded / braided / double shield
-
Structure: signal / power / hybrid
-
Jacket: PUR (standard), flame-retardant optional
Customization:
-
Torsion-optimized designs
-
High-speed motion variants
-
Hybrid power + data integration
Installation Parameters That Affect Service Life
Cable design alone does not determine lifespan. Installation geometry is equally critical.
-
Maintain torsion within rated limits
-
Avoid forced twist during installation
-
Use compatible dress pack systems
-
Prevent localized compression points
Improper routing is a common cause of premature failure, even with high-grade cable.
Typical Industrial Applications
-
Automotive robotic welding lines
-
High-speed pick-and-place systems
-
Assembly robots in electronics manufacturing
-
CNC robotic loading systems
These applications combine torsion, speed, and continuous operation cycles.
FAQ
What distinguishes robot cable from flexible control cable?
Robot cable is designed for combined torsion and bending, while standard flexible cable is not torsion-rated.
What happens if torsion limits are exceeded?
Internal structure destabilizes, leading to conductor stress concentration and early failure.
Is shielding always required?
Only in environments with electromagnetic interference (e.g., servo drives, welding systems).
Why is PUR commonly used?
Polyether PUR maintains flexibility under low temperature and resists abrasion in dynamic environments.
Request Technical Matching
For accurate selection, provide:
-
Robot type and motion profile
-
Required torsion and bend conditions
-
Signal or power requirements
-
Installation environment
A matched configuration can be recommended based on actual operating conditions.