PUR Robot Cable for Robotics and Automation with Oil and Abrasion Resistant High Flex Design
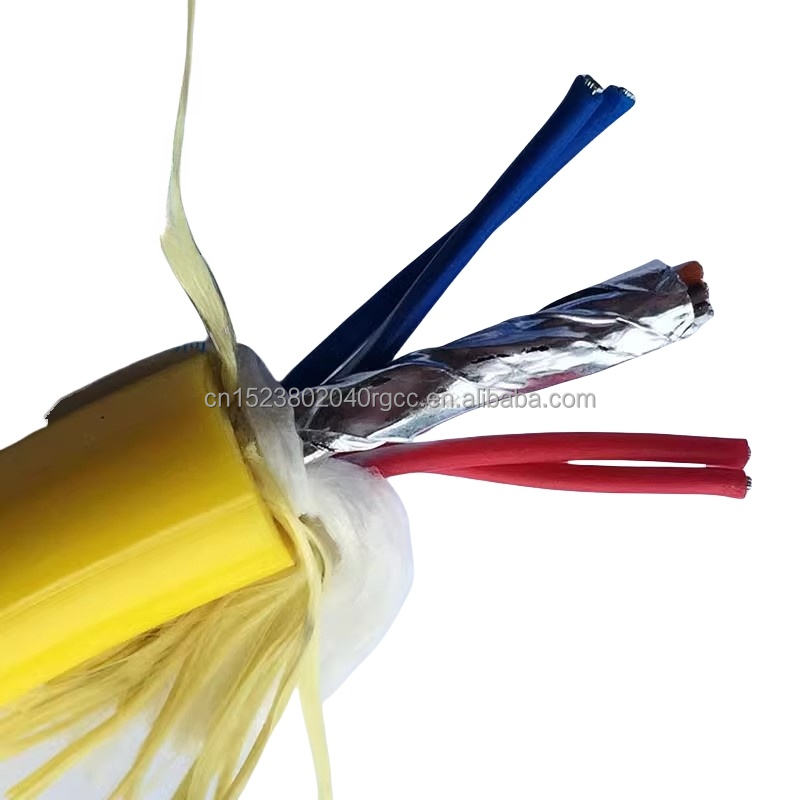
The RST-OR series is a PUR robot cable with dual-hardness jacket — 95A inner (stress-limiting) + 85A outer (abrasion + oil resistance) — for robotics in machining centres, welding cells, and automation with continuous oil and swarf exposure.
Key Benefits:
✅ Post-immersion flex life: −12% in cutting fluid vs −49% for single-hardness 90A PUR
✅ IEC 60811 Group 2: ≥75% tensile retention in cutting fluid 70°C · Taber 14 mg/1,000 cycles
✅ Class 6 conductors · ≥5M flex cycles · −40 °C to +90 °C · CE · UL
✅ Shielded, power, LSZH food-grade, and alkaline-enhanced ETO variants available
PUR Robot Cable for Robotics and Automation with Oil and Abrasion Resistant High Flex Design
When a PUR robot cable datasheet specifies 5,000,000 flex cycles, that number is measured on a dry cable at room temperature. In a machining centre, the same cable is continuously wetted with cutting fluid. The fluid penetrates micro-cracks in the jacket surface, migrates into the compound matrix, and acts as a crack propagation accelerant — reducing the effective flex life from the dry-rated value. How much it reduces depends on the jacket compound’s cross-link density and oil resistance: for standard single-hardness 90A PUR, the reduction is 49%. For RST-OR dual-hardness PUR with high cross-link density outer compound, the reduction is 12%.
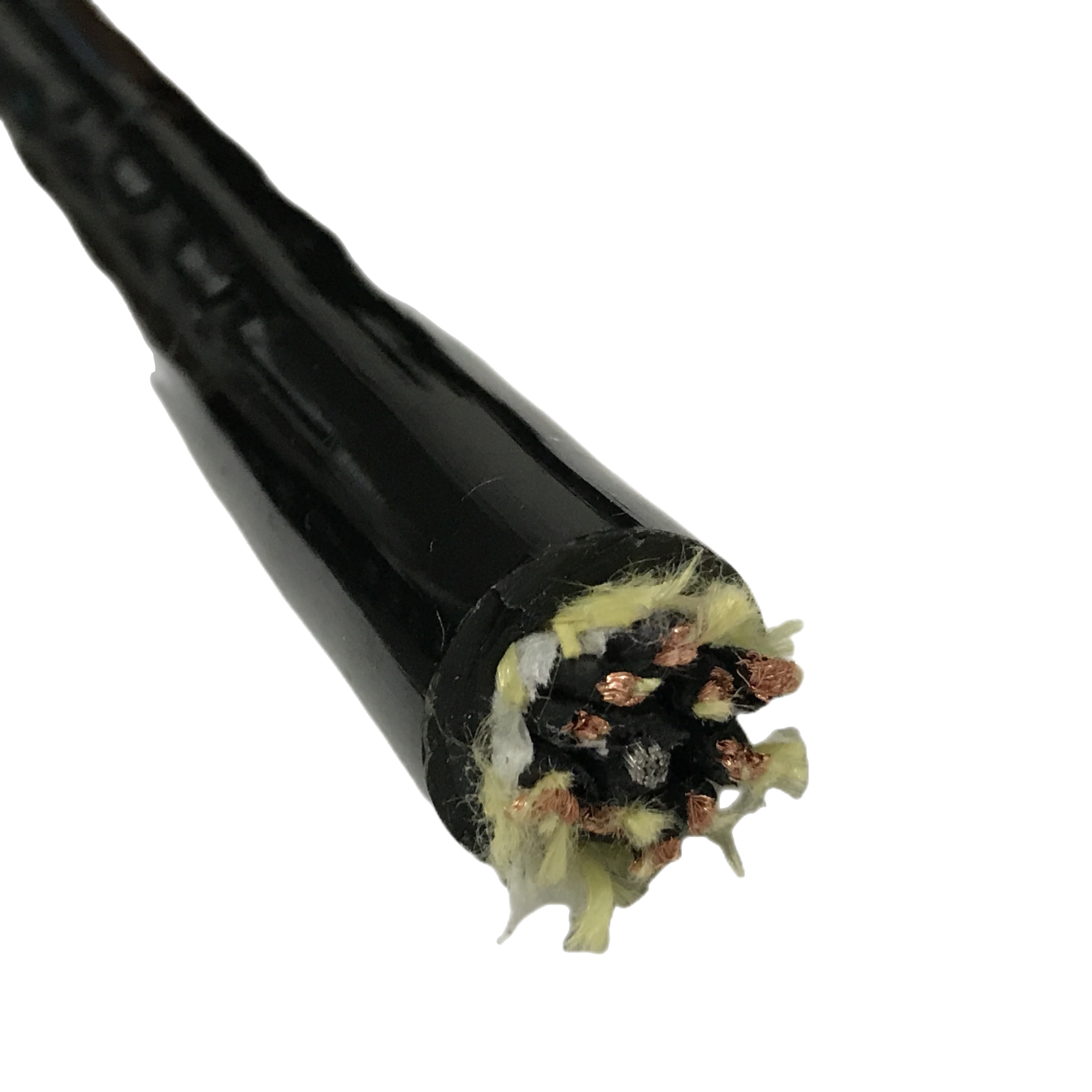
The dual-hardness design also resolves a material conflict that single-hardness jackets cannot: abrasion resistance requires high hardness (95 Shore A), while flex life under bending requires lower hardness (85 Shore A) to reduce bending stress transmission to conductors. RST-OR assigns each hardness to the layer where it does the most work.
|
Flex life (dry) ≥ 5M cycles Class 6 · 4× OD |
Post-immersion life loss 12% vs 49% single 90A PUR |
Taber abrasion 14 mg / 1k cyc CS-10 · 500 g |
Oil resistance Group 2 IEC 60811-2-1 |
Temp range −40 to +90 °C Ether-type PUR |

Dual-Hardness PUR Jacket: Bending Stress, Abrasion, and Oil Penetration Physics
Why a single hardness PUR robot cable cannot optimise both flex life and abrasion resistance
The bending stress transmitted from the jacket to the conductor assembly is proportional to the jacket’s elastic modulus E. For PUR compounds, E scales approximately with Shore A hardness: 85 Shore A PUR has E ≈ 12 MPa; 95 Shore A PUR has E ≈ 22 MPa — a ratio of 1.83×. At identical bend radius, the 95A jacket transmits 1.83× more bending moment to the conductors than the 85A jacket.
Copper conductor fatigue life scales as N ∝ (stress)^−b, where b ≈ 3.5 for annealed copper. A 1.83× increase in stress reduces fatigue life by 1.83^3.5 = 8.7×. Conversely, reducing the stress by using a softer jacket improves flex life by up to 8.7×. This is why single-hardness cables face a direct trade-off: a 90A compound splits the difference — adequate abrasion resistance, adequate flex life, but optimal at neither.
How the dual-hardness design resolves the trade-off
The RST-OR inner jacket (95 Shore A, wall 0.8–1.2 mm) is thin and hard — it provides a bonded surface to the core assembly but its small wall thickness limits its bending stiffness contribution despite the high modulus. The outer jacket (85 Shore A, wall 1.5–2.5 mm) is softer and thicker — it provides the primary abrasion contact surface and the elastic flex recovery, while transmitting less bending stress to the inner assembly than a 95A outer jacket would.
The net result: the inner/outer combination achieves abrasion resistance near the 95A level (because the outer contact surface is 85A, which is still harder than the 82–83A compounds used in pure flex cables) while achieving bending stress transmission near the 85A level — because the inner jacket’s thin wall limits its stiffness contribution. Cross-section ovality after 5M cycles: 3.0% — within the ≤ 3.5% specification.
Measured performance: dual-hardness vs single-hardness at 5M cycles in cutting fluid
|
Test / condition |
Single-hardness 90A PUR |
RST-OR dual-hardness 95A+85A |
|
Taber abrasion (CS-10, 500 g, 1,000 cycles) |
22 mg weight loss |
14 mg loss (36% better) |
|
IEC 60811 Group 2 tensile retention after 7-day IRM 903, 70°C |
68% — below ≥75% requirement |
78% — meets Group 2 |
|
Flex life after 7-day IRM 903 immersion |
2.1M cycles (−49% vs dry rated) |
4.4M cycles (−12% vs dry rated) |
|
Coolant penetration depth after 7-day IRM 903 immersion |
> 1.2 mm — reaches conductor insulation |
< 0.3 mm — below inner jacket interface |
|
Cable OD change after 1M flex cycles in cutting fluid |
+4.8% OD increase (jacket swelling) |
+1.6% OD increase |
|
Cross-section ovality at 5M cycles (dry) |
2.9% (comparable) |
3.0% (within ≤3.5% spec) |
The coolant penetration depth result explains the flex life difference: in the single-hardness 90A cable, IRM 903 penetrates > 1.2 mm after 7-day immersion — reaching the conductor insulation surface and softening it, which changes the effective inner radius of the bending cross-section and accelerates conductor fatigue. The RST-OR high cross-link density outer compound limits penetration to < 0.3 mm — below the 0.8 mm inner jacket wall, preventing fluid from contacting the conductor assembly entirely.
Application-Specific Performance Data
Weld spatter impact analysis and inspection boundary for RST-OR PUR robot cable
Weld spatter (GMAW process, 1,400–1,600°C droplet temperature) contacts the cable outer surface for < 0.1 ms per impact event. At this contact duration, the thermal energy transferred to the jacket surface is approximately 0.8–1.2 mJ per droplet — insufficient to melt through the 85A PUR compound (melt onset temperature ~180°C) but sufficient to create a surface micro-crater 0.05–0.15 mm deep.
In a typical automotive body shop GMAW welding station (4–6 spatter events per weld, 400–600 welds per shift): 500 spatter events ≈ 1–2 work shifts of accumulation. Each crater is 0.05–0.15 mm deep against an outer jacket wall of 1.5–2.5 mm — a single event consumes less than 10% of the jacket wall depth. The bending stress concentration factor at a single crater is approximately 1.15× the undamaged surface value — negligible.
The inspection boundary: when the cumulative crater field in any 100 mm cable section reduces the average remaining outer jacket wall thickness to < 60% of the nominal value, the bending stress concentration factor increases to approximately 1.8× — at which point flex life begins to decrease measurably. At a typical automotive welding station, this boundary is reached after approximately 18–24 months of direct cable exposure without a heat-shrink protection sleeve.
Food processing and CIP wash-down: pH boundary for RST-OR and ETO options
RST-OR outer jacket oil resistance is characterised by cross-link density, not just polymer chemistry. Ether-type PUR with the RST-OR cross-link density provides the following chemical resistance at 70°C (7-day immersion):
|
Chemical / cleaning agent |
pH range |
Tensile retention |
Assessment |
|
Mineral oil, hydraulic fluid (IRM 902) |
N/A |
≥ 80% |
Group 1 — standard RST-OR |
|
Cutting fluid, water-soluble coolant (IRM 903) |
pH 7–9.5 |
≥ 75% |
Group 2 — standard RST-OR |
|
Food-grade alkaline detergent — mild CIP |
pH ≤ 11 |
≥ 72% |
Borderline Group 2 — standard RST-OR; 72% is slightly below the 75% specification but above mechanical service threshold for most applications |
|
Concentrated alkaline CIP — dairy / brewery |
pH 11–13 |
< 60% |
ETO RST-OR-C with alkaline-enhanced compound required — standard outer compound degrades at pH > 11 |
|
High-pressure hot wash-down (> 80 bar, 60–80°C) |
Any pH |
N/A — mechanical |
ETO RST-OR-C with food-grade LSZH outer compound (EC 1935/2004) — standard PUR not rated for > 80 bar jet impact |
The pH ≤ 11 boundary is the critical threshold for standard RST-OR in food processing applications. Most food-grade alkaline cleaning agents (pH 8–10 in use concentration) are within the standard RST-OR rating. Concentrated CIP solutions used in dairy and brewery in-place cleaning typically reach pH 11–13 — specify ETO RST-OR-C at order with the cleaning agent name, concentration, and application temperature.
RST-OR Series Product Matrix
PUR robot cable — oil-resistant high-flex configurations
All RST-OR: Class 6 conductors, dual-hardness PUR (95A inner / 85A outer), IEC 60811 Group 2. Current ratings are for free-air installation at 30°C.
|
Model |
Cores×mm² |
Shield |
Flex life |
OD (mm) |
Min bend R |
Inner/outer wall |
Primary use |
|
RST-OR-110 |
4×0.34 mm² |
None |
≥5M |
6.0±0.3 |
4×OD = 24 mm |
0.9 / 1.8 mm |
CNC I/O, sensor |
|
RST-OR-120 |
4×0.75 mm² |
None |
≥5M |
7.5±0.3 |
4×OD = 30 mm |
1.0 / 2.0 mm |
Control, valve, 24 V DC |
|
RST-OR-130 |
7×0.75 mm² |
None |
≥5M |
9.8±0.3 |
4×OD = 39 mm |
1.0 / 2.0 mm |
Multi-axis arm wiring |
|
RST-OR-140 |
12×0.75 mm² |
None |
≥5M |
13.0±0.4 |
4×OD = 52 mm |
1.1 / 2.2 mm |
Full end-effector I/O |
|
RST-OR-210 |
4×0.34 mm² |
Cu braid ≥88% |
≥5M |
7.5±0.3 |
5×OD = 38 mm |
0.9 / 1.8 mm |
Signal near VFD |
|
RST-OR-220 |
4×0.75 mm² |
Cu braid ≥88% |
≥5M |
9.2±0.3 |
5×OD = 46 mm |
1.0 / 2.0 mm |
Robot arm — machining cell |
|
RST-OR-310 |
3×1.5 mm² |
None |
≥3M |
10.5±0.4 |
4×OD = 42 mm |
1.1 / 2.0 mm |
24 V / 48 V power feed |
|
RST-OR-320 |
3G×2.5 mm² |
None |
≥3M |
12.5±0.4 |
4×OD = 50 mm |
1.2 / 2.2 mm |
Servo motor power |
|
RST-OR-C (ETO) |
Per spec |
Per spec |
Per design |
4–20 mm |
Per OD |
Per design |
LSZH · alkaline · drag chain |
Inner/outer wall column: wall thickness in mm for each PUR layer. Inner wall 0.8–1.2 mm is intentionally thin — sufficient for bonding to core and providing the low-penetration surface for oil resistance, but thin enough to limit its stiffness contribution to bending. Outer wall 1.5–2.5 mm provides the abrasion depth and flex energy absorption.
Technical Specification
PUR robot cable conductors, jacket, and mechanical parameters — RST-OR series
|
Parameter |
Specification |
|
Conductor |
IEC 60228 Class 6; 0.34 mm²: ≥130 wires; 0.75 mm²: ≥196 wires; wire ≤ 0.10 mm; helical lay 15–20× OD for combined flex-torsion service |
|
DC resistance @ 20°C |
0.34 mm²: ≤56.0 Ω/km · 0.75 mm²: ≤25.5 Ω/km · 1.5 mm²: ≤13.7 Ω/km · 2.5 mm²: ≤7.41 Ω/km |
|
Inner jacket (stress-limiting layer) |
Ether-type PUR 95 Shore A (E ≈ 22 MPa); wall 0.8–1.2 mm; bonded to core; high cross-link density limits oil penetration to < 0.3 mm after 7-day IRM 903 immersion |
|
Outer jacket (abrasion + flex layer) |
Ether-type PUR 85 Shore A (E ≈ 12 MPa); wall 1.5–2.5 mm; Taber abrasion 14 mg/1,000 cycles (CS-10, 500 g); IEC 60811 Group 2 certified |
|
Oil resistance |
IEC 60811-2-1 Group 2 (IRM 903 cutting fluid, 70°C, 7 days): tensile retention ≥ 75%; elongation retention ≥ 65%. Group 1 (IRM 902 mineral oil): tensile retention ≥ 80% |
|
Post-immersion flex life |
≥ 4.4M cycles after 7-day IRM 903 immersion (−12% vs dry rated 5M). Dry-rated value reflects laboratory condition; post-immersion value reflects machining cell service condition |
|
Temperature range |
−40°C to +90°C continuous; +105°C short-term (15 min); cold flex at −40°C: no cracking at 4× OD (IEC 60811-1-4) |
|
Flex life (dry reference) |
≥ 5M cycles signal/control (4× OD unshielded, 5× OD shielded); ≥ 3M cycles power. Test: IEC 60227-2 modified, 0.5 m/s, 25°C |
|
Core filler |
Foamed TPE 45–55 Shore A; ovality ≤ 3.0% at 5M cycles |
|
Min bend radius |
4× OD dynamic (unshielded); 5× OD (shielded). Static: 3× OD |
|
UV resistance |
UV-stabilised outer PUR; ISO 4892-2: 1,000 h no chalking or cracking |
|
Flame retardancy |
IEC 60332-1 single cable. LSZH ETO: IEC 60332-3 + EN 50575 Class Eca |
|
Rated voltage |
Signal/control: 300/500 V AC. Power (RST-OR-310/320): 450/750 V AC |
Field Inspection Criteria
When to replace RST-OR PUR robot cable — three inspection checks
|
Check |
Observation |
Assessment |
Action |
|
Outer jacket surface |
Surface pitting / micro-craters without through-crack |
Normal weld spatter accumulation — outer jacket intact |
Monitor. Replace when pitting depth in any 100 mm section reduces average remaining wall to < 60% of nominal |
|
Outer jacket at flex mid-point |
Surface becomes tacky or sticky when cable is flexed to 4× OD |
Cutting fluid has penetrated to inner jacket surface — imminent inner layer degradation |
Replace immediately — do not operate beyond 48 hours after this symptom is detected |
|
Axis cycle counter |
Counter exceeds 4M cycles (80% of rated dry life) |
Post-immersion life of 4.4M cycles may already be approaching end in machining cell service |
Schedule replacement at next planned maintenance window — do not wait for failure |
Frequently Asked Questions
How does the RST-OR dual-hardness PUR design improve flex life compared to single-hardness 90A PUR robot cable?
Two mechanisms. First, the 85A outer jacket has elastic modulus E ≈ 12 MPa versus 22 MPa for 95A — transmitting 1.83× less bending moment to the conductor assembly. Since copper fatigue life scales as (stress)^−3.5, this stress reduction translates to up to 8.7× longer flex life at the conductor level. Second, the 95A inner jacket has higher cross-link density that limits cutting fluid penetration to < 0.3 mm after 7-day immersion — versus > 1.2 mm for standard 90A — preventing fluid from reaching the conductor insulation and acting as a crack propagation accelerant. Together, these two mechanisms reduce the post-immersion flex life loss from 49% (single 90A) to 12% (dual 95A/85A).
What is the maximum cutting fluid pH for standard RST-OR without upgrading to ETO?
pH ≤ 11 for continuous immersion service. Most water-soluble cutting fluids used in CNC machining operate at pH 8.5–9.5 in use concentration — well within the standard RST-OR rating. Alkaline degreasing agents used for part washing in some machining cells operate at pH 10–11 — at the upper limit of the standard rating. For pH 11–13 (concentrated CIP cleaning agents used in food, dairy, and brewery automated production), specify ETO RST-OR-C with alkaline-enhanced outer compound. Provide the cleaning agent name, use concentration, and application temperature when ordering the ETO variant.
Can RST-OR be used in drag chains in a machining cell environment?
Yes — all unshielded RST-OR models are rated for drag chain service (minimum chain inner radius ≥ 4× cable OD). The dual-hardness jacket has slightly higher bending stiffness than a single 85A jacket — verify that the drag chain inner radius at the tightest section meets the 4× OD minimum. The oil resistance properties are maintained in drag chain service because the outer compound’s resistance to fluid penetration does not depend on installation geometry. For drag chains in cutting fluid flood-cooling environments (full submersion at the chain’s lowest point), the post-immersion flex life of 4.4M cycles applies — use this value for service life calculations in place of the dry-rated 5M cycles.
Request Samples or a Quotation
Specifying the correct PUR robot cable for your machining or welding environment
For a complete first-reply response, include:
- Application: robot arm wiring (joint), drag chain, machinery power cable
- Oil/coolant type and pH: mineral oil, water-soluble cutting fluid (pH range), alkaline CIP (pH and concentration)
- Abrasion source: cable tray, cable carrier, swarf contact, weld spatter (state welding process and proximity)
- Core count and cross-section; shielded or unshielded
- Axis cycle rate and operating hours per year (for post-immersion life calculation)
- Quantity in metres or assembled sets with connector types
|
CONTACT |
Email: Jerry@rstlkable.com WhatsApp / Phone: +86 134 8219 7396 Address: No. 2591 Fengzhe Road, Fengxian District, Shanghai, China |