High Flex Robot Cable for Continuous Motion Systems with Long Service Life and Durability
The RST-HF series is a high flex robot cable designed for continuous motion systems, robotic arms, and cable carrier applications. Its flexible conductor structure supports repeated bending in dynamic routing, while the durable outer jacket helps resist abrasion, oil, and mechanical wear. This cable is suitable for signal, control, feedback, and selected low-power transmission in demanding industrial environments.
Key Benefits:
✅ High flexibility for repeated bending and continuous movement
✅ Long service life in dynamic industrial routing
✅ Durable jacket with abrasion and oil resistance
✅ Suitable for robotic arms, cable carriers, and automation systems
High Flex Robot Cable for Continuous Motion Systems with Long Service Life and Durability
The High Flex Robot Cable for Continuous Motion Systems with Long Service Life and Durability is developed for robotic arms, cable carriers, automated handling equipment, gantry systems, and other moving industrial installations where the cable is exposed to repeated bending over long operating cycles. It is intended for signal, control, feedback, and selected low-power circuits in applications where standard fixed-installation cable is not suitable for dynamic service.
In continuous-motion equipment, cable failure usually begins with one of three problems: conductor fatigue from repeated flexing, core displacement caused by unstable internal structure, or jacket damage caused by abrasion and dragging contact. This cable is designed to reduce those risks through a fine-stranded conductor design, motion-oriented core arrangement, and a durable outer jacket selected for dynamic industrial routing.
The result is a high flex robot cable better suited to moving systems than standard control cable, especially in applications where cable life, maintenance interval, and machine uptime are directly affected by the routing condition.

Designed For
This cable is intended for:
-
repeated bending in fixed routing paths
-
cable carrier and guided travel applications
-
robotic arm and moving automation assemblies
-
compact routing spaces where flexibility matters
-
long-cycle industrial operation where downtime must be reduced
This cable should be evaluated separately for:
-
continuous torsional robot wrist motion
-
protocol-specific Ethernet or fieldbus applications
-
high-speed data transmission with defined impedance requirements
-
hybrid power applications with higher current demand than standard control circuits
Product Summary
| Item | Description |
|---|---|
| Product Type | High flex robot cable |
| Main Use | Continuous-motion signal, control, feedback, and selected low-power transmission |
| Typical Installations | Robotic arms, cable carriers, gantry systems, moving machine sections, automated assembly equipment |
| Core Design | Motion-oriented multi-core construction |
| Conductor Type | Fine-stranded copper |
| Jacket Type | PUR or application-matched high-durability jacket |
| Movement Type | Repeated bending, guided travel, continuous dynamic routing |
| Supply Form | Cut length, coil, reel, project supply |
Typical Product Series
Series Name: RST-HF-RC
Series Category: High flex cable for robotic and continuous-motion systems
| Product Model | Product Name | Typical Core Count | Typical Use | Shield Option | Jacket |
|---|---|---|---|---|---|
| RST-HF-RC-04 | High flex robot cable, 4 cores | 4C | Robotic arm control and moving signal loops | Optional | PUR |
| RST-HF-RC-08 | High flex robot cable, 8 cores | 8C | Automation control and feedback routing | Optional | PUR |
| RST-HF-RC-12 | High flex robot cable, 12 cores | 12C | Multi-circuit moving control assemblies | Recommended | PUR |
| RST-HF-RC-SP | High flex hybrid robot cable | Custom | Selected signal and low-power combined circuits | Optional | PUR |
| RST-HF-RC-C | Custom high flex robot cable | Custom | Project-based motion applications | Custom | PUR / project-matched |
Technical Parameters
The values below are typical selection items. Final design should be confirmed according to core count, conductor size, movement type, routing path, and shielding requirement.
| Parameter | Typical Range / Description |
|---|---|
| Conductor Material | Fine-stranded bare copper |
| Typical Conductor Sizes | 0.14 mm², 0.20 mm², 0.25 mm², 0.34 mm², 0.50 mm², larger sizes on request |
| Core Count | 2C to multi-core custom constructions |
| Core Arrangement | Motion-oriented stranded core layout |
| Shielding | Unshielded, overall foil shield, braid, or project-based shield structure |
| Jacket Material | PUR or application-matched dynamic-service jacket |
| Jacket Characteristics | Abrasion resistant, oil resistant, flexible, suitable for moving industrial service |
| Motion Condition | Repeated bending, cable carrier routing, continuous reciprocating movement |
| Temperature Range | Confirmed according to final jacket and project condition |
| Minimum Bend Radius | Confirmed according to cable diameter and movement type |
| Outer Diameter | Depends on conductor size, core count, and shield structure |
| Application Scope | Signal, control, feedback, sensor, and selected low-power circuits |
| Supply Format | Cut length, coil, reel, OEM and project supply |

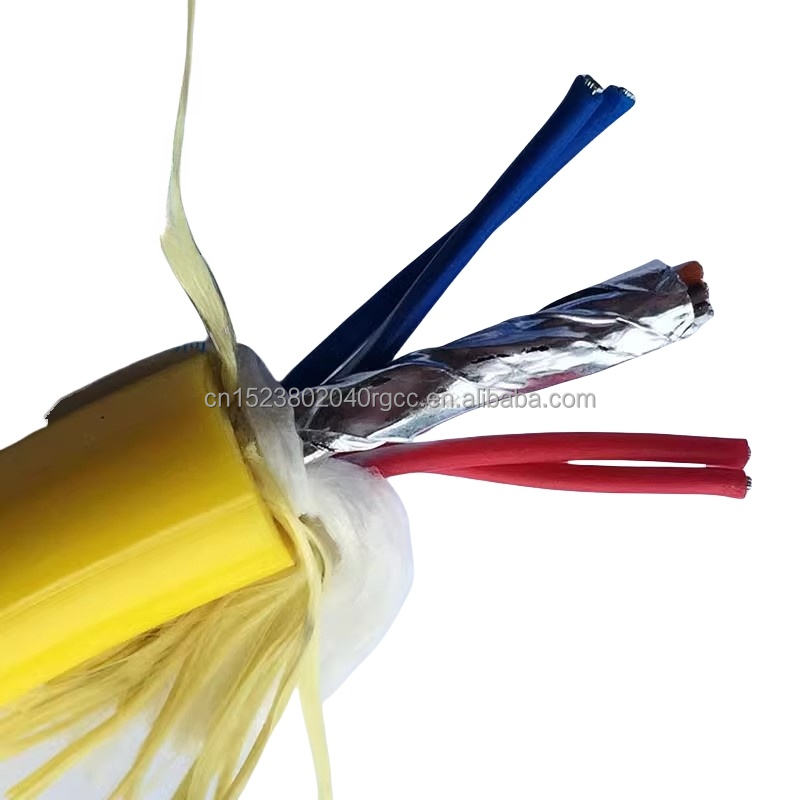
Cable Construction
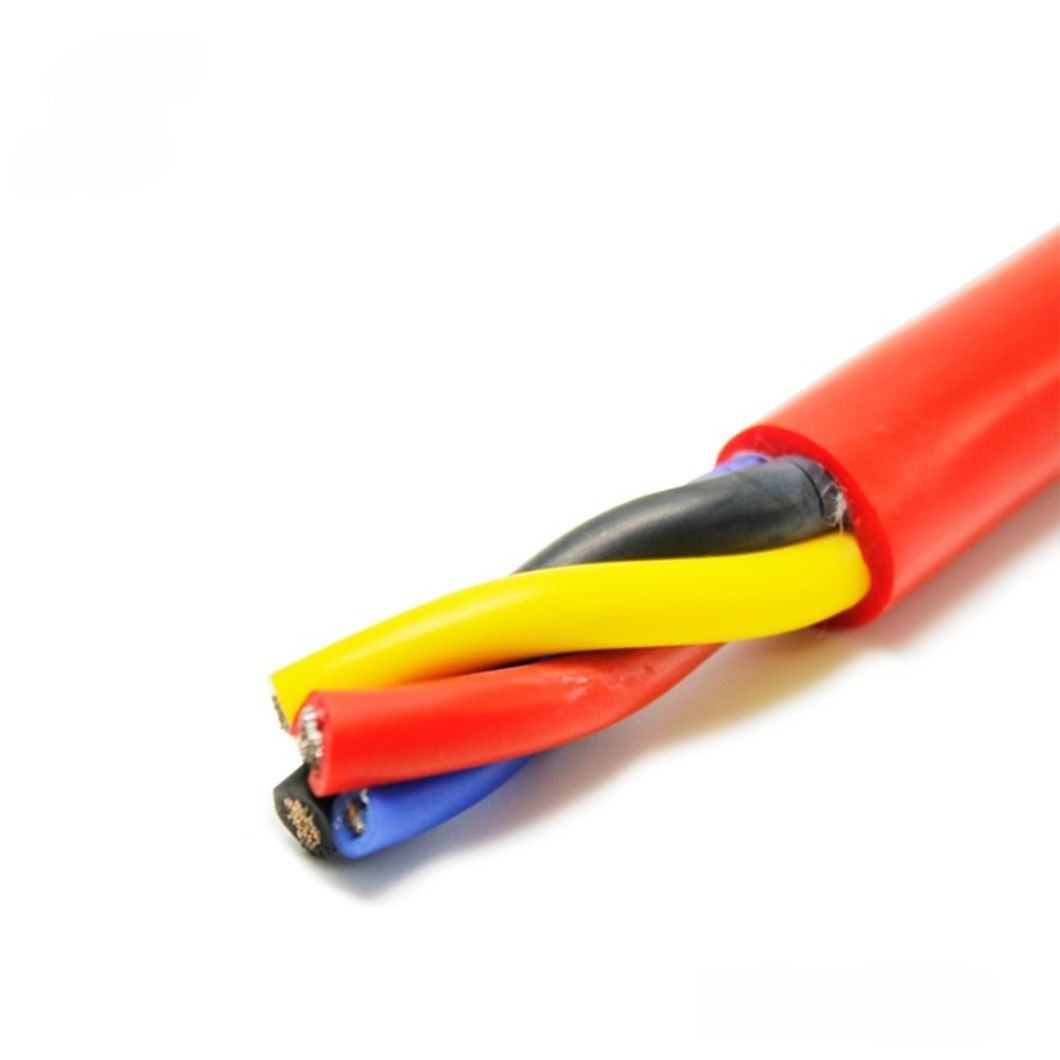
Fine-Stranded Conductors
A high flex cable depends first on conductor design. Fine-stranded copper conductors distribute bending stress more evenly than less flexible constructions and help reduce the risk of conductor fatigue in repeated motion.
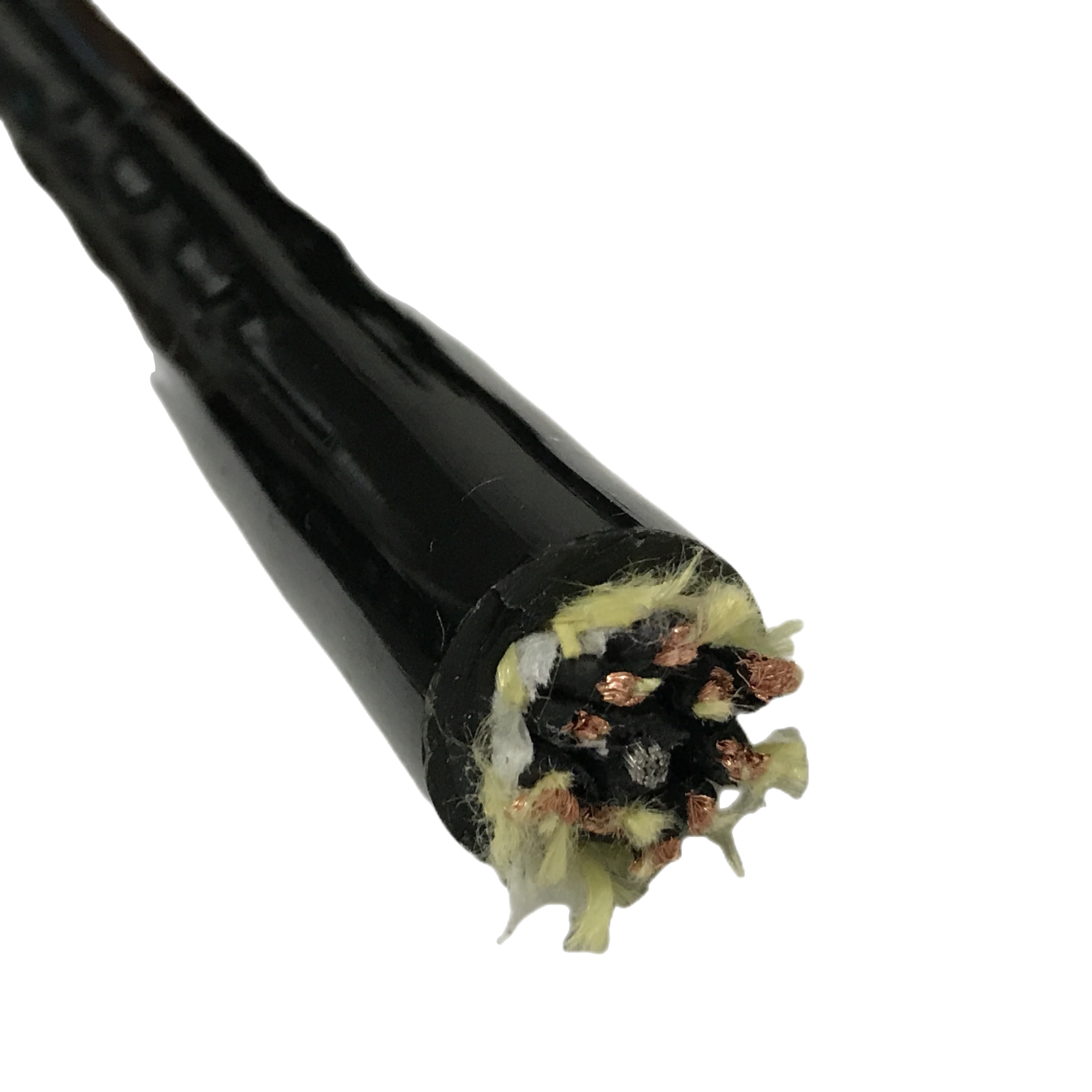
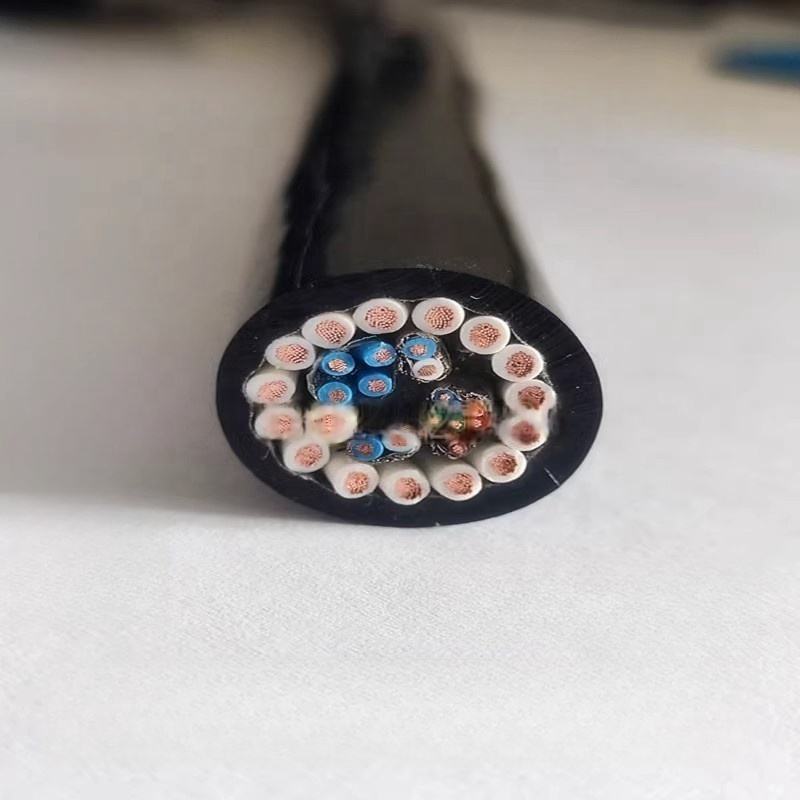
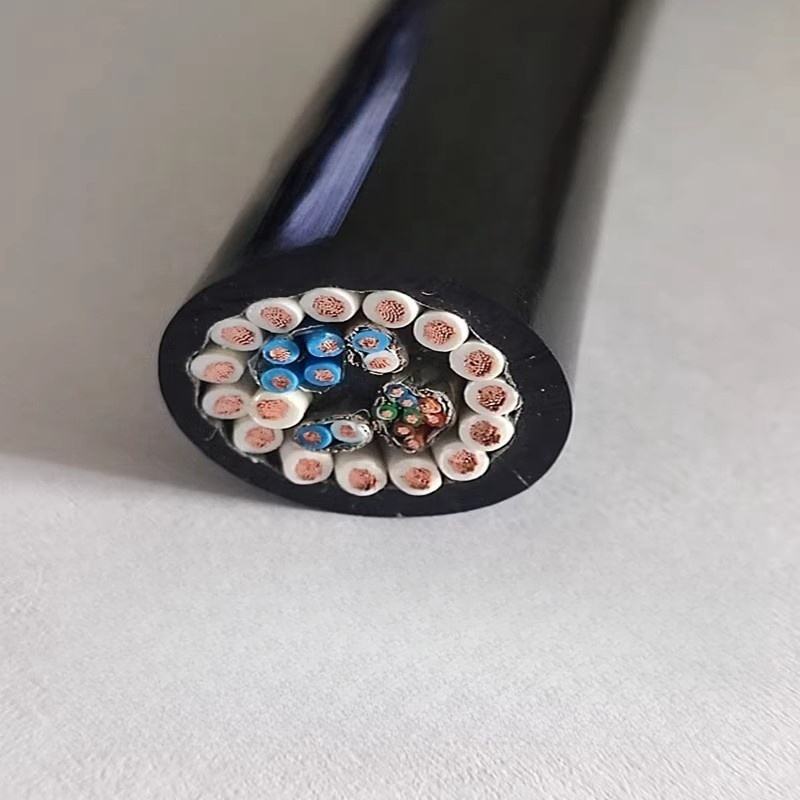
Motion-Oriented Core Layout
In dynamic cable service, internal stability matters as much as conductor flexibility. The core arrangement is designed to reduce internal displacement during repeated bending so the cable can better maintain its mechanical structure over long-cycle operation.
Fillers and Binding for Dynamic Stability
Where required by construction, internal support elements are used to help keep the cable round, reduce local stress points, and improve stability in cable carriers and moving assemblies.
Optional Shielding
For installations near motors, servo drives, switching devices, or parallel power routing, shielded versions are available. Shielding is recommended when stable control or feedback transmission is required in electrically noisy environments.
Durable Outer Jacket
The outer jacket is selected for dynamic industrial service where abrasion, dragging contact, oil mist, and surface wear are common. In continuous-motion systems, jacket performance has a direct effect on service life because outer damage often becomes the first visible sign of cable failure.
Why High Flex Construction Extends Cable Life
A long-service-life motion cable is not defined by flexibility alone. Service life depends on how the whole structure handles repeated stress in the actual installation.
Reduced Conductor Fatigue
Repeated bending creates cyclic stress in each conductor strand. A high flex conductor structure helps reduce fatigue concentration during long operating cycles.
Better Stability in Dynamic Routing
When a cable travels through a fixed path again and again, internal movement can shorten life if the structure is not designed for dynamic service. A motion-oriented core layout helps the cable remain more stable in repeated-routing applications.
Lower Risk of Jacket Wear Failure
In robotic and automation equipment, the cable may contact guides, brackets, chain links, machine edges, or nearby cable bundles. A durable jacket helps reduce wear-related failure in these abrasion-prone conditions.
Better Fit for Long-Cycle Production Equipment
Continuous-motion systems run for long hours and often repeat the same movement thousands of times per shift. In this type of equipment, the correct cable structure can reduce maintenance frequency and improve machine uptime.
Continuous Motion Application Boundary
This cable is suitable for:
-
repeated reciprocating bending
-
fixed-path movement in cable carriers
-
moving control loops in robotic and automation systems
-
guided travel with defined bending zones
-
applications where the main stress is repeated flexing rather than free torsion
This cable requires separate confirmation for:
-
continuous torsional motion
-
unsupported hanging travel
-
robot wrist rotation with combined bend-and-twist stress
-
high-speed protocol-specific communication
-
higher-load power circuits with thermal or voltage constraints
This boundary matters because not every “flexible cable” is suitable for every type of robotic movement.
Typical Applications
The High Flex Robot Cable for Continuous Motion Systems is commonly used in:
-
robotic arm control circuits
-
cable carrier routing
-
automated assembly lines
-
servo and feedback loops
-
packaging machinery
-
pick-and-place systems
-
gantry automation
-
material handling equipment
-
transfer units and moving machine sections
-
CNC machine auxiliary motion circuits
Typical Working Conditions
-
long-cycle repeated bending
-
compact installation space
-
guided motion in carriers or tracks
-
abrasion-prone routing paths
-
oil mist or coolant splash exposure
-
mixed routing near motors and drives
High Flex Robot Cable vs Standard Control Cable
| Comparison Item | High Flex Robot Cable | Standard Control Cable |
|---|---|---|
| Intended Installation | Dynamic motion | Fixed or light movement |
| Repeated Bending Suitability | Better | Limited |
| Internal Motion Stability | Better | Usually lower |
| Jacket Wear Resistance in Moving Paths | Better | More installation-dependent |
| Service Life in Cable Carriers | Typically longer | Usually shorter |
| Best Use | Robotic and continuous-motion systems | General control wiring |
A standard control cable may work in a lightly moving application, but it is usually not the preferred choice for continuous bending over long operating cycles.
PUR Jacket vs Standard PVC Jacket
| Comparison Item | PUR Jacket | PVC Jacket |
|---|---|---|
| Abrasion Resistance | Higher | Moderate |
| Oil Resistance | Better | Usually lower |
| Dynamic Durability | Better for moving service | More suitable for lighter-duty use |
| Wear Life in Cable Routing | Typically longer | More installation-dependent |
| Recommended Use | Cable carriers, robotics, continuous-motion automation | General industrial wiring |
For continuous-motion systems, PUR is generally preferred when wear resistance and longer service life are required.
Selection Guide
Correct selection depends on the actual movement condition, not only on core count.
1. Confirm Function
Identify whether the cable carries signal, control, sensor, feedback, or selected low-power circuits.
2. Confirm Motion Type
Repeated bending, cable carrier travel, and robot-internal routing create different stress patterns. The cable should be matched to the actual movement condition.
3. Confirm Core Count and Conductor Size
Select the number of cores and conductor size according to circuit design, current demand, voltage drop, and terminal requirements.
4. Confirm Shielding Requirement
Where the cable is routed near servo drives, inverters, motors, or power cables, shielded construction is recommended for signal-sensitive circuits.
5. Confirm Routing Space
The minimum available bend space and overall diameter limit should be checked before final model confirmation.
6. Confirm Environmental Exposure
Abrasion, oil, coolant, and installation temperature all influence jacket selection and final structure.
7. Confirm Travel Path
Carrier length, bend zone, clamp position, and routing method should be reviewed because service life in dynamic use is strongly affected by installation layout.
Customization and Supply
Custom construction is available for project-based dynamic applications.
Available Options
-
core count
-
conductor size
-
shield structure
-
jacket type
-
jacket color
-
cable marking
-
outer diameter target
-
cut length or reel supply
Supply Support
-
model matching based on motion type and routing path
-
sample supply for evaluation
-
drawing and structure confirmation before production
-
OEM and project supply
-
industrial batch production
Ordering Information
For faster quotation and model selection, provide:
-
application type
-
core count
-
conductor size
-
shield requirement
-
cable length
-
motion type
-
routing method
-
installation environment
-
quantity demand
Inquiry Example
8 cores, 0.25 mm², overall shield, PUR jacket, cable carrier routing, repeated reciprocating movement, 500 meters
Call to Action
Request a Quote for High Flex Robot Cable
Send the application details for model selection, structure confirmation, and pricing.
FAQ
What is a high flex robot cable used for?
It is used for signal, control, feedback, sensor, and selected low-power transmission in robotic and automation systems where the cable is exposed to repeated movement.
Is this cable suitable for cable carriers?
Yes. It is intended for guided travel and repeated bending in carrier-type routing, subject to final structure and installation condition.
Can it be used inside robotic arms?
Yes, for moving robotic routing where the main stress is repeated bending. Continuous torsional movement should be confirmed separately.
Why does high flex construction improve service life?
It helps reduce conductor fatigue, improves internal structural stability during repeated motion, and lowers the risk of early failure in dynamic routing.
Is shielding required?
Not always. For simple low-noise circuits, unshielded construction may be acceptable. Near motors, drives, or parallel power routing, shielded construction is usually preferred.
What is the difference between this cable and standard control cable?
This cable is designed specifically for repeated movement and long-cycle dynamic service, while standard control cable is generally intended for fixed installation or limited motion.
Why choose PUR for continuous motion systems?
PUR generally provides better abrasion resistance, oil resistance, and wear life in moving industrial service than standard PVC.
Is custom construction available?
Yes. Core count, conductor size, shielding, jacket type, marking, and supply format can be matched to project requirements.